 Technology Co., Ltd.")
YB-type LiDAR
The Yuanbao series LiDAR is a single-line LiDAR based on the dToF (direct Time-of-Flight) ranging principle. It features a compact size, ease of use, high precision, and high cost-effectiveness, making it suitable for diverse applications such as navigation and obstacle avoidance, and area monitoring.
Product Category:
YB-type LiDAR
Keywords:
Type ENT safety light curtain
YB-type LiDAR

Details
Parameters
Specifications
Size
Install
Download
Product Features
1. Consistent scanning plane height
2. Miniaturized, compatible with more usage scenarios
3. Low power consumption, effectively extending device lifespan and battery life. Multi-user monitoring, supporting up to 4 users to access the configuration software simultaneously
4. No blind spots, high accuracy is guaranteed even near windows, safe and reliable protection
5. High-precision measurement, angular resolution as low as 0.1°, accurately identifying the surrounding environment
6. Strong anti-homologous light interference capability, multiple devices can work simultaneously without interference
Numbering Rules

Protection Zone Configuration Introduction

| Identifier | Meaning | Description |
| 1 | Protection Zone 1 | When an obstacle is detected, OUTPUT1 goes to OFF state |
| 2 | Protection Zone 2 | When an obstacle is detected, OUTPUT2 goes to OFF state |
| 3 | Protection Zone 3 | When an obstacle is detected, OUTPUT3 goes to OFF state |
Cable Interface
The configuration cable is a standard USB Type-C data cable (optional).
The cable structure is shown in the figure below, with a standard length of 1 meter.

| Color | Signal | Description |
| Blue | 0V | Working Power Supply |
| Brown | 24V | |
| Yellow/Green | PE | |
| Red/Blue | COM | Common terminal of the zone group switching signal input. When the input signal is PNP logic, COM is connected to 0V; when the input signal is NPN logic, COM is connected to 24V |
| Pink | INPUT1 | Zone group selection signal, switching between zone groups is achieved through changes in the INPUT1, INPUT2, INPUT3, INPUT4 input signals |
| Green | INPUT2 | |
| Gray | INPUT3 | |
| Red | INPUT4 | |
| Black | OUTPUT1 |
Three independent PNP(NPN) outputs; PNP transistor output; In ON state, load current ≤100mA, output voltage ≥Vcc-2V; In OFF state, leakage current ≤1mA, residual voltage ≤1V (excluding the influence of wire extension); NPN transistor output, In ON state, load current ≤100mA, output voltage ≤2V; In OFF state, leakage current ≤1mA, residual voltage ≤2V (excluding the influence of wire extension); The protection zone is in ON state when there is no object; it is in OFF state when there is an object |
| White | OUTPUT2 | |
| Purple | OUTPUT3 | |
| Gray/Pink | OK | Independent PNP(NPN) output, fault state output OFF, ON state when no fault |
|
Model Technical Parameters Table |
|||||||||||||||||||
|
Product Classification |
Measurement Radar |
Obstacle Avoidance Radar |
Dual Output Radar |
232 Radar |
|||||||||||||||
|
Specifications Parameters |
YB27-15CE |
YB27-25CE |
YB27-25HE |
YB27-35HE |
YB27-40HE |
YB27-15CS |
YB27-25CS |
YB27-25HS |
YB27-35HS |
YB27-40HS |
YB27-15CD |
YB27-25CD |
YB27-25HD |
YB27-35HD |
YB27-40HD |
YB27-15CR |
YB27-25CR |
||
|
Ranging Radius |
15m @70% Reflectivity |
25m @70% Reflectivity |
35m @70% Reflectivity |
40m @70% Reflectivity |
15m @70% Reflectivity |
25m @70% Reflectivity |
35m @70% Reflectivity |
40m @70% Reflectivity |
15m @70% Reflectivity |
25m @70% Reflectivity |
35m @70% Reflectivity |
40m @70% Reflectivity |
15m @70% Reflectivity |
25m @70% Reflectivity |
|||||
|
Scanning Angle |
270° |
||||||||||||||||||
|
Angular Resolution |
Default 20Hz 0.15° (Configurable) |
Default 25Hz 0.1° (Configurable) |
Obstacle avoidance default 30Hz 0.3°, configurable frequency, fixed resolution |
Obstacle avoidance default 30Hz 0.3° (Configurable) |
30Hz 0.5° (1°, 2° configurable) |
||||||||||||||
|
Distance Deviation |
±2cm (typical value)① |
||||||||||||||||||
|
Repeatability |
±4mm@1sigma② |
||||||||||||||||||
|
Scanning Plane Angle |
Pitch ±0.5°; Roll ±0.5° |
||||||||||||||||||
|
Operating Voltage |
DC 9~28V |
||||||||||||||||||
|
Start-up Time |
Typical value 10s |
||||||||||||||||||
|
Power Consumption |
<2W (no load on output) |
||||||||||||||||||
|
Output |
Ethernet UDP protocol output |
PNP/NPN configurable (default PNP) |
Ethernet UDP protocol output; PNP/NPN configurable |
RS232 output |
|||||||||||||||
|
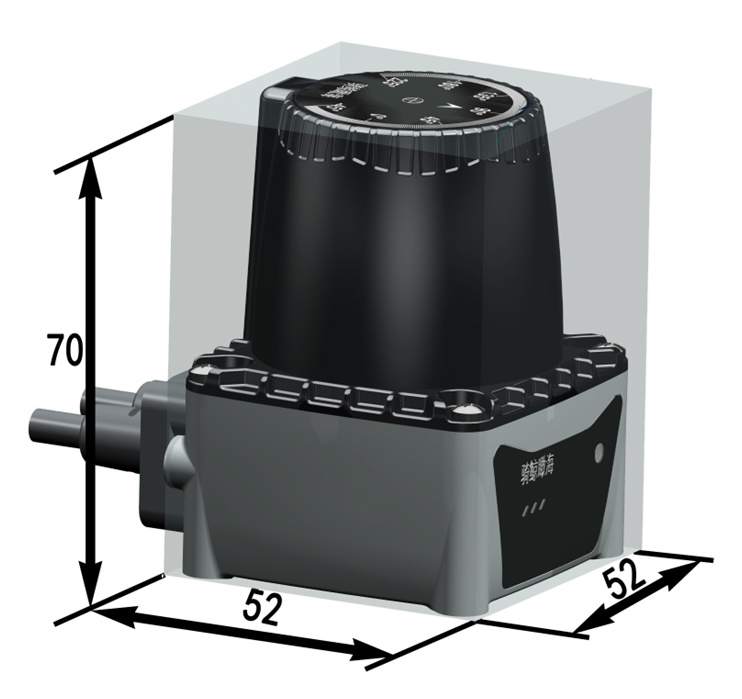
Dimensions |
52mm×52mm×70mm |
||||||||||||||||||
|
Ambient Temperature |
Operating: -10℃~50℃ (window free of frost and fog); Storage: -40℃~70℃ |
||||||||||||||||||
|
Ambient Humidity |
Operating: 35%RH~85%RH; Storage: 35%RH~95%RH |
||||||||||||||||||
|
Anti-light Interference |
80000Lux |
||||||||||||||||||
|
Impact Resistance |
Acceleration 10g; Pulse duration: 16ms; |
||||||||||||||||||
|
Number of collisions: Three axes, 1000±10 times per axis |
|||||||||||||||||||
|
Vibration Resistance |
Frequency 10Hz~55Hz; Amplitude: 0.35±0.05mm; |
||||||||||||||||||
|
Number of scans: 20 times for each of the XYZ axes |
|||||||||||||||||||
|
Protection Level |
IP65 |
||||||||||||||||||
|
Electromagnetic Compatibility (EMC) |
(EMI) EN61326-1:2013, EN55011:2009 + A1:2010 |
||||||||||||||||||
|
(EMS) EN61326-1:2013, EN61000-4-2:2009, EN61000-4-3:2006+A1:2009+A2:2010 |
|||||||||||||||||||
|
(EMS) EN61000-4-4:2004+A1:2010, EN61000-4-6:2014, EN61000-4-8:2010 |
|||||||||||||||||||
The YB27-□□□S series and YB27-□□□D series radars with obstacle avoidance function have configurable functions.
|
|
|
| Configurable Functions (Obstacle Avoidance) | |
|
Zone Configuration |
Users can configure the YB's zones into the desired shape through the configuration software. |
|
Response Time |
67ms (2-circle scan)~536ms (16-circle scan), default 67ms |
|
Zone Group Switching |
4 groups of external input signals (INPUT1, INPUT2, INPUT3, INPUT4) realize the switching of 16 zone groups |
|
Specifications and Parameters Table |
||||
|
Product Category |
Product Specifications |
Ranging Radius (@70% reflectivity) |
Angular Resolution |
Output Method |
|
Measurement Type |
YB27-15CE |
15m |
Default 0.15°@20Hz (0.2/0.25/0.3/0.33/0.5)°@25Hz 0.5°@50Hz fast adjustment |
Ethernet UDP protocol output |
|
YB27-25CE |
25m |
|||
|
YB27-25HE |
Default 0.1°@25Hz |
|||
|
YB27-40HE |
40m |
|||
|
Obstacle Avoidance Type |
YB27-15CS |
15m |
Default 0.3°@30Hz |
PNP/NPN configurable (Default PNP) |
|
YB27-25CS |
25m |
|||
|
YB27-25HS |
Default 0.3°@30Hz |
|||
|
YB27-40HS |
40m |
|||
|
Dual Output Type |
YB27-15CD |
15m |
Default 0.3°@30Hz |
Ethernet UDP protocol output; PNP/NPN configurable |
|
YB27-25CD |
25m |
|||
|
YB27-25HD |
Adjustable frequency @(20/25/30/40/50)Hz Obstacle avoidance application default 0.3°@30Hz Measurement application default 0.1° adjustable data port resolution |
|||
|
YB27-40HD |
40m |
|||
|
RS232 Type |
YB27-15CR |
15m |
Default 0.5°@30Hz |
RS232 output |

Related Products

The SH series of deep-sea safety laser scanners is a high-performance single-line laser scanner based on the direct time-of-flight (dTOF) ranging principle. This product meets the high-level safety requirements of Type 3 (IEC 61496), SIL2 (IEC 61508), Cat. 3 (ISO 13849-1), and PL d (ISO 13849-1). It establishes definable protection zones using an invisible laser beam to protect hazardous areas, enabling protection of hazardous operating points, passageways, or hazardous areas of racks.

The ENT safety light curtain is TÜV certified and achieves safety levels of Type4, Cat.4, PLe, and SIL 3. It uses optical synchronous communication, features a compact and elegant design, and offers superior performance. Suitable for safety protection in hazardous environments within the automation field, such as mechanical presses, hydraulic presses, shearing machines, and bending machines.
The Yuanbao series LiDAR is a single-line LiDAR based on the dToF (direct Time-of-Flight) ranging principle. It features a compact size, ease of use, high precision, and high cost-effectiveness, making it suitable for diverse applications such as navigation and obstacle avoidance, and area monitoring.

The KH150-30ETH series solid-state LiDAR is a LiDAR system that does not contain any mechanically moving parts. Its operating principle is based on Optical Phased Array (OPA) technology and beam steering technology. It uses electronic control to direct and scan the laser beam, thereby achieving environmental detection.
Online Message
Filling in your phone number and E-mail information will help us contact you in time and solve the problems you raised as soon as possible.